Con 2400 bloques de LEGO y mucha paciencia Wiil Gorman ha construido una impresora de Lego en 3d.
El software está desarrollado en Java y obtiene el diseño en 3D desde un archivo de MLCad.
Un simple, pero efectivo, robot para doblar camisetas construido con Lego Mindstorms NXT por los estudiantes de ingeniería de la universidad de Stanford.
Con la última actualización del firmware IOS 4.1 del Iphone se han solucionado los problemas que tenía con la transferencia de audio a través de bluetooth a través de A2DP (Advanced Audio Distribution Profile ) ya que hasta esta versión se reproducían las canciones con cortes intermitentes en el Pioneer DEH-P75BT.
También los ingenieros de Apple han incluido el protocolo AVRCP (Audio/Video Remote Control Profile) con el cual DEH-P75BT es compatible y te permite parar, avanzar , adelantar y retroceder de canción sin tener que acceder al Iphone, realizando toda la actuación desde el reproductor Pioneer.
Para poder reproducir canciones a través de bluetooth en el DEH-P75BT tienes que tener activada la fuente BT Audio en las opción de configuración.
Este Monster Chess, cuyo tablero mide nada menos que 14,5 metros cuadrados, cuenta con 38 Lego Mindstorms NXT y unas 100.000 piezas de Lego que se dividen de la siguiente manera; 37.000 piezas aproximadamente para el tablero, 18.000 piezas para la base de los Robots, 17.000 para los modelos 3D de las piezas y 23.000 piezas para los mosaicos del tablero.
El juego se controla desde un ordenador con pantalla táctil, que con un software de ajedrez permite varias modalidades de juego: Jugador vs. Jugador, Jugador vs. PC y PC vs. PC. El ordenador se comunica con cada una de las piezas mediante Bluetooth indicando su movimiento. Cada casilla dispone de un código de colores único, lo que permite a los robots reportar su situación exacta al ordenador en todo momento. Si el montaje es impresionante, el software utilizado es tanto ó más: se ha usado LabVIEW para controlar los robots,C# para gestionar la información desde el ordenador y un software estándar para controlar el juego de ajedrez propiamente dicho.
Un robot 100% LEGO (sin tener en cuenta el portátil y el cubo Rubik) capaz de resolver un cubo Rubik de 3x3x3 en menos de 12 segundos.
Para su construcción se han empleado:
– 4 RCX
– 24 motores (2 en cada salida de los RCX)
– 4 sensores de rotación
– 8 sensores de contacto
– 4 sensores de luz
– 10 luces 9V,
– 1 juego de luces PF para iluminar el cubo durante el escaneado
– 2 elementos fiber optics
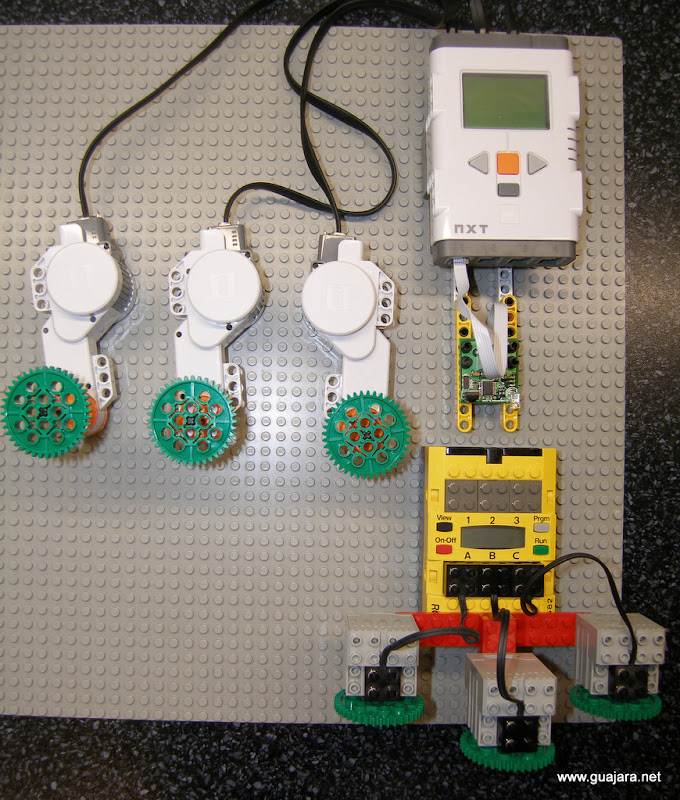
A continuación cuelgo una foto de unas pruebas que estoy realizando para poder controlar 6 motores utilizando un NXT y un RCX aprovechando el NRLink-Nx de mindsensors.com
En breve pondré un video y la descripción del programa que estoy realizando en NXT-G
Este sitio web utiliza cookies para que usted tenga la mejor experiencia de usuario. Si continúa navegando está dando su consentimiento para la aceptación de las mencionadas cookies y la aceptación de nuestra política de cookies, pinche el enlace para mayor información.